Los Sistemas de Coordenadas son muy útiles ya que de su correcta elección un problema puede resolverse fácilmente o por el contrario puede resultar muy complejos o casi imposible. Este post contiene las diferentes equivalencias que existen entre los Sistemas de Coordenadas más comunes.
Tenga presente que existen otros sistemas de coordenadas como parabólicas, paraboloidales, elípticas, eferoidales alargadas y achatadas, bipolares, toroidales, cónicas, entre otras.
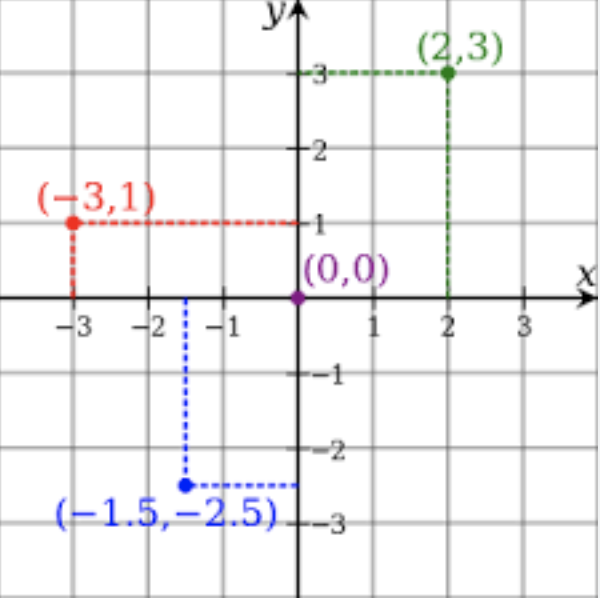
Las coordenadas rectangulares especifica un punto en el plano usando las distancias a los ejes coordenados como se muestra en la figura siguiente.
Figura 1. Sistema de Coordenadas Rectangulares
Las ecuaciones para convertir del sistema rectangular a sistema polar son las siguientes.
$r^2=x^2+y^2$
$tan \theta = \frac{y}{x}$
1.2. Coordenadas Polares
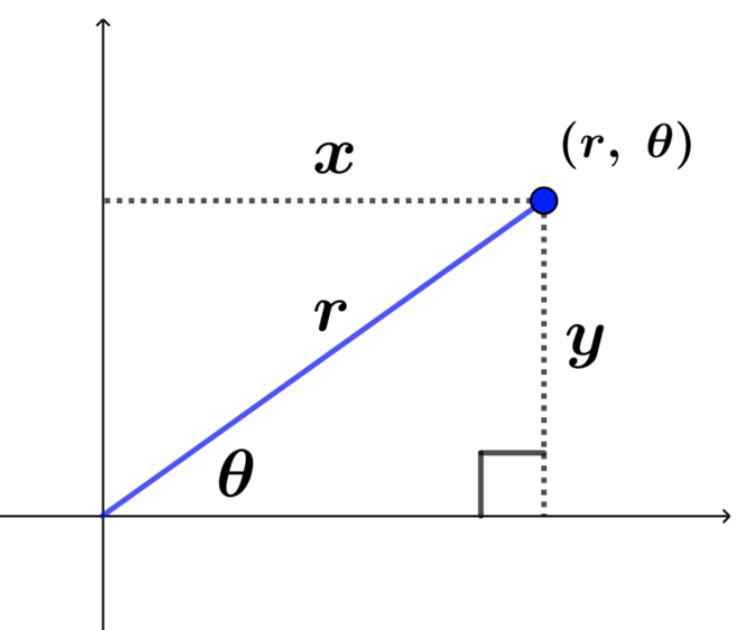
las coordenadas polares especifican un punto en el plano usando las distancias al origen y el ángulo que forma el vector desde el origen al punto en cuestión tal y como se muestra en la figura siguiente.
Figura 2. Sistema de Coordenadas Polares
Las ecuaciones para convertir del sistema polar al sistema rectangular son las siguientes.
$x=r\cos\theta$
$y=r\sin\theta$
2. Coordenadas en 3D
2.1. Coordenadas Rectangulares
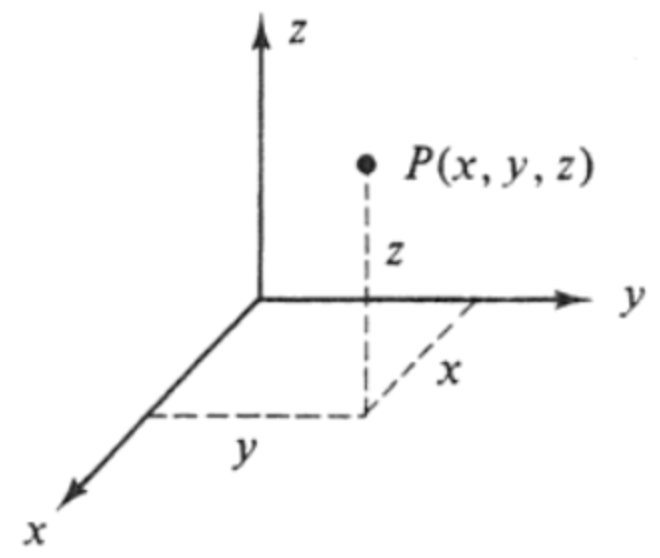
Este caso es la extensión del sistema rectangular en 2D agregando la profundidad en el eje $z$ como se muestra en la siguiente figura.
Figura 3. Coordenadas Rectangulares en 3D
Para convertir coordenadas rectangulares en cilíndricas usamos las siguientes ecuaciones.
$r^2=x^2+y^2$
$tan \theta = \frac{y}{x}$
$z=z$
Para convertir coordenadas rectangulares en esféricas usamos las siguientes ecuaciones.
$r^2=x^2+y^2+z^2$
$\tan\phi=\frac{y}{x}$
$\cos\theta=\frac{z}{\sqrt{x^2+y^2+z^2}}$
2.2. Coordenadas Cilíndricas
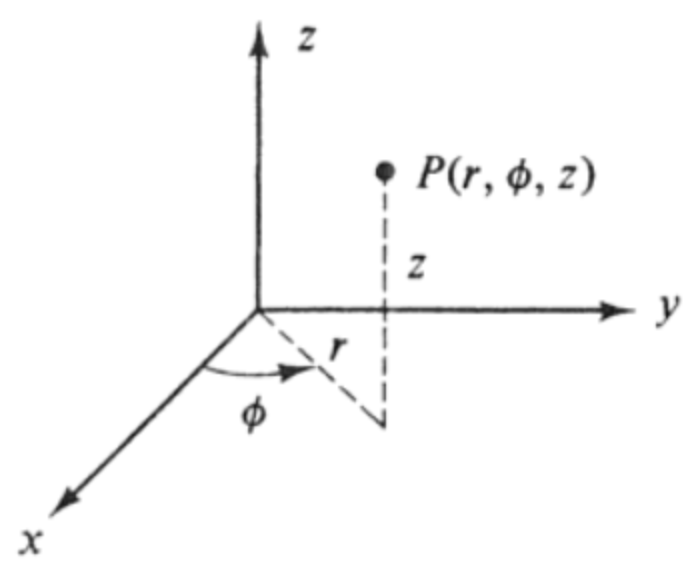
Este caso es la extensión del sistema polar en 2D agregando la profundidad en el eje $z$ como se muestra en la siguiente figura.
Figura 4. Sistema de Coordenadas Cilíndricas
Las ecuaciones para convertir de coordenadas cilíndricas a coordenadas rectangular son las siguientes.
$x=r\cos\theta$
$y=r\sin\theta$
$z=z$
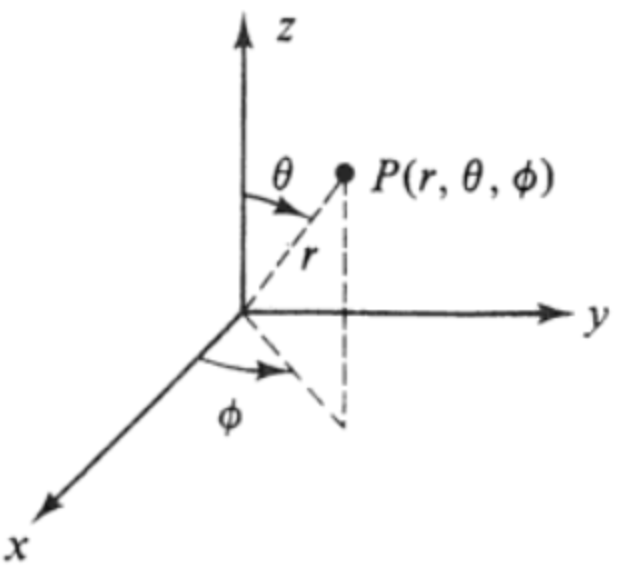
2.3. Coordenadas Esféricas
Estas coordenadas se construye con base a los ángulos que se forman entre el vector posición (entre el origen y el punto) y los diferentes ejes coordenados y la longitud del vector tal y como se muestra en la siguiente figura.
Figura 5. Sistema de Coordenadas esféricas
Las ecuaciones para convertir de coordenadas esféricas a sistema rectangular son las siguientes.
Las funciones de dos variables son una extensión de las funciones de las funciones de una sola variable que se estudian en este post. Adicionalmente, las Funciones de dos variables y Superficies correspondientes son comúnmente utilizadas en una sin fin de aplicaciones practicas.
Las Funciones de dos variables y Superficies son análogas a las funciones de una sola variable y por lo tanto aplican los mismos conceptos como Dominio y Rango.
En este caso se puede representar la función de la siguiente manera:
$f(x,y)=z$
Donde $z$ es la función de las variables independientes $x$ y $y$ el dominio $D$ y el rango el conjunto de valores que puede tomar $f$ es decir ${f(x,y)|(x,y) \in D}$
2. Gráficas de Funciones de dos variables
Las gráficas de estas funciones pueden realizarse en $\mathbb R^3$ de tal manera que:
$z=f(x,y)$ y $(x,y) \in D$
Así como en el caso de una sola variable era muy conveniente tener la representación de la línea recta, en el caso de dos dimensiones es muy útil la extensión de este concepto para obtener funciones lineales que son planos en $\mathbb R^3$, la función lineal es la siguiente
$f(x,y)=ax+by+c$
Algunas gráficas importantes se muestran a continuación, así como las denominadas superficies cuadráticas que se obtiene de las diferentes combinaciones de las esfera.
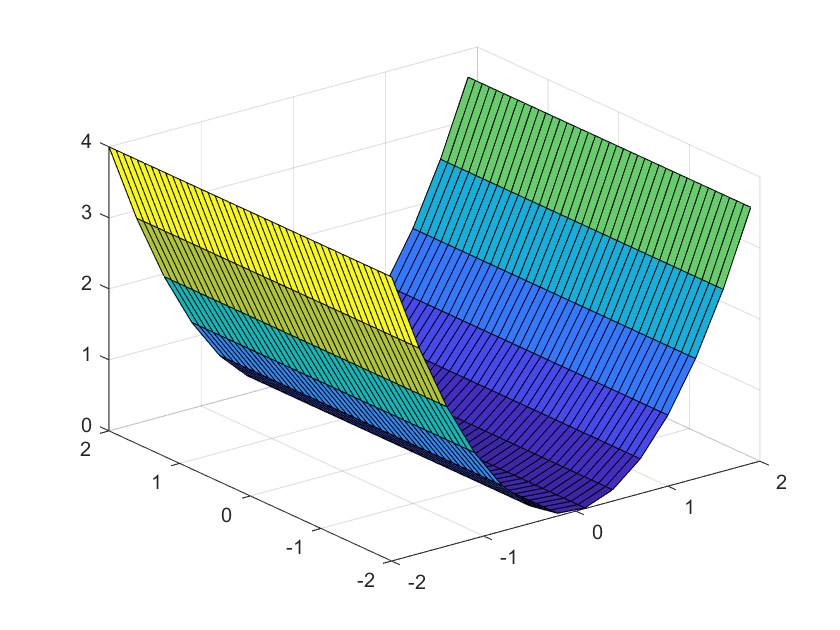
2.1. Cilindro parabólico
Esta gráfica esta dada por la ecuación:
$f(x,y)=x^2$
Figura 1. Cilindro parabólico
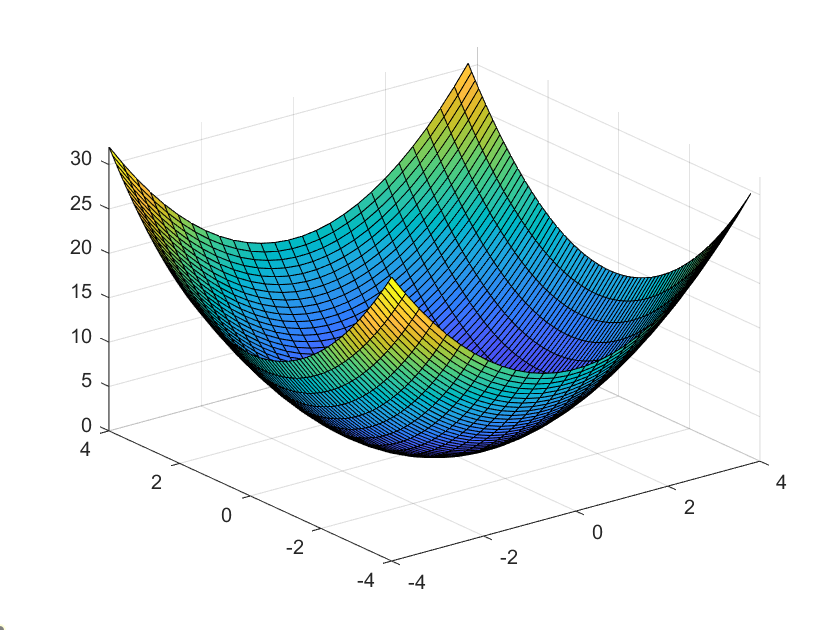
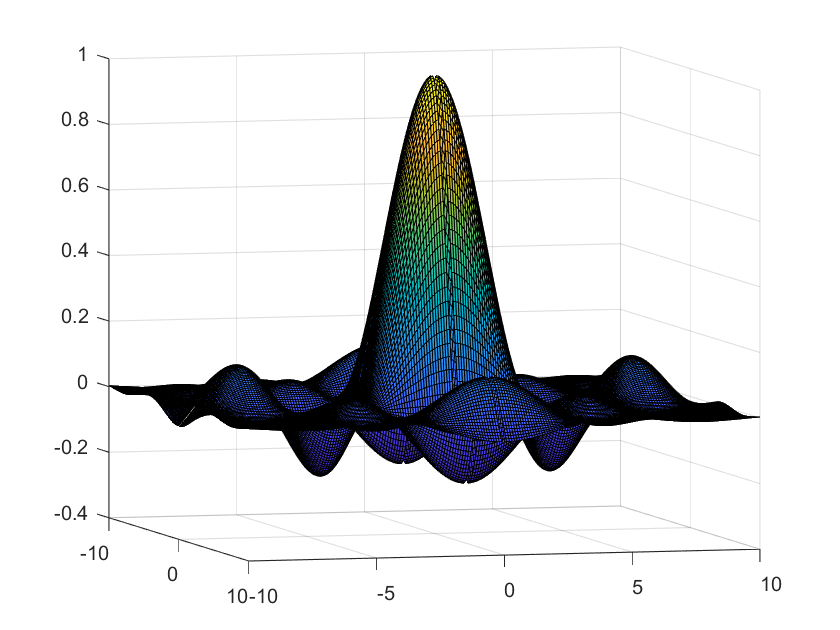
2.2. Paraboloide elíptico
Esta gráfica de una superficie cuadrática esta dada por la ecuación:
$\frac{z}{c}=\frac{x^2}{a^2}+\frac{y^2}{b^2}$
Figura 2. Paraboloide elíptico
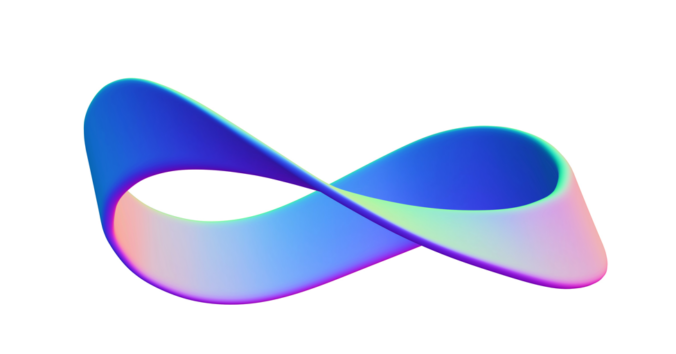
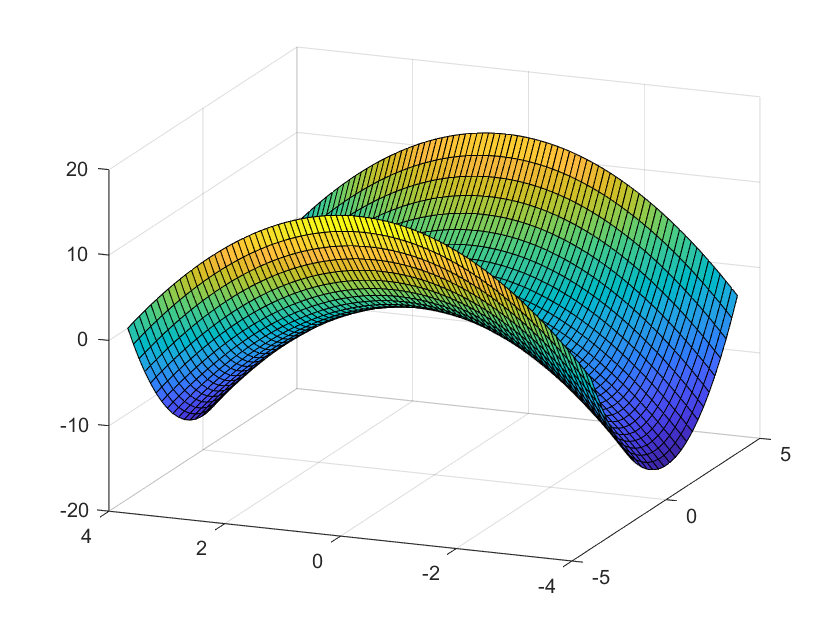
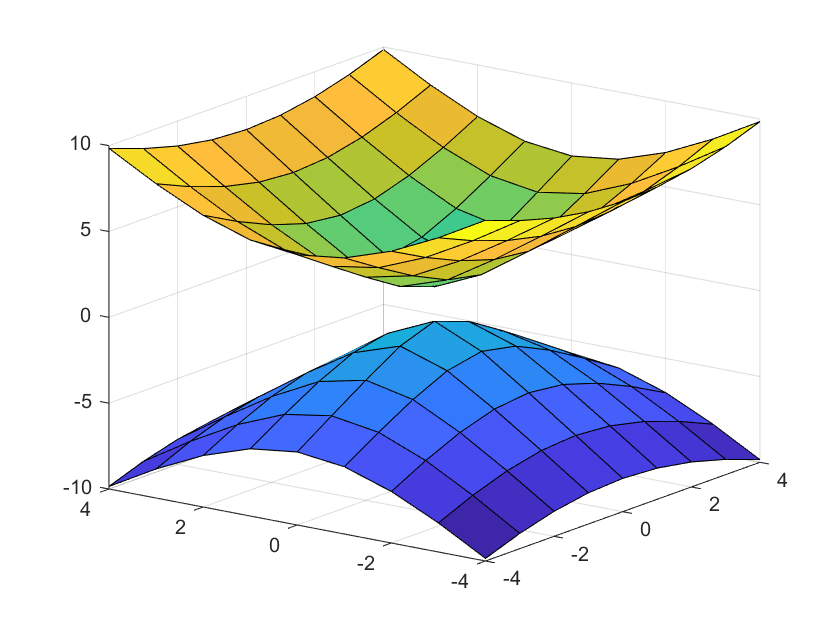
2.3. Paraboloide hiperbólico
Esta gráfica de una superficie cuadrática esta dada por la ecuación:
$\frac{z}{c}=\frac{x^2}{a^2}-\frac{y^2}{b^2}$
Figura 3. Paraboloide hiperbólico
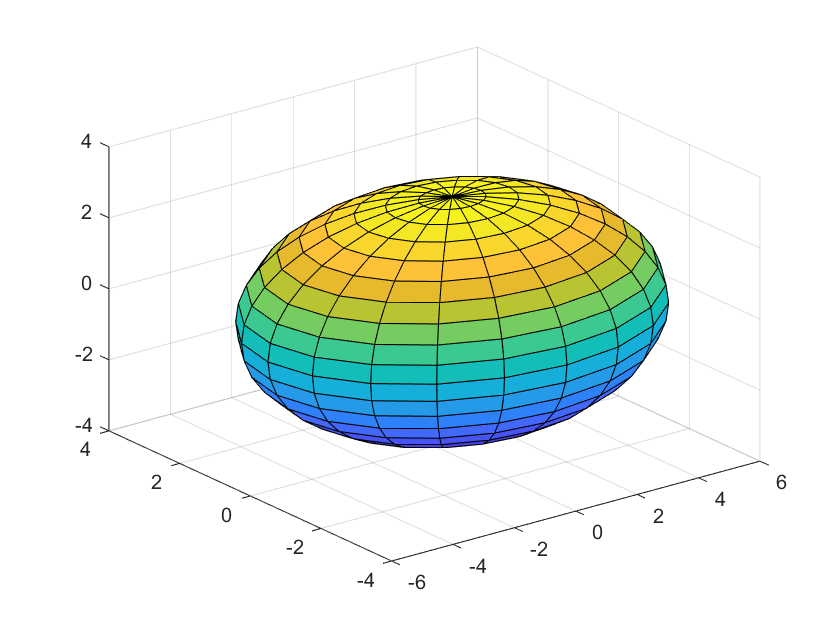
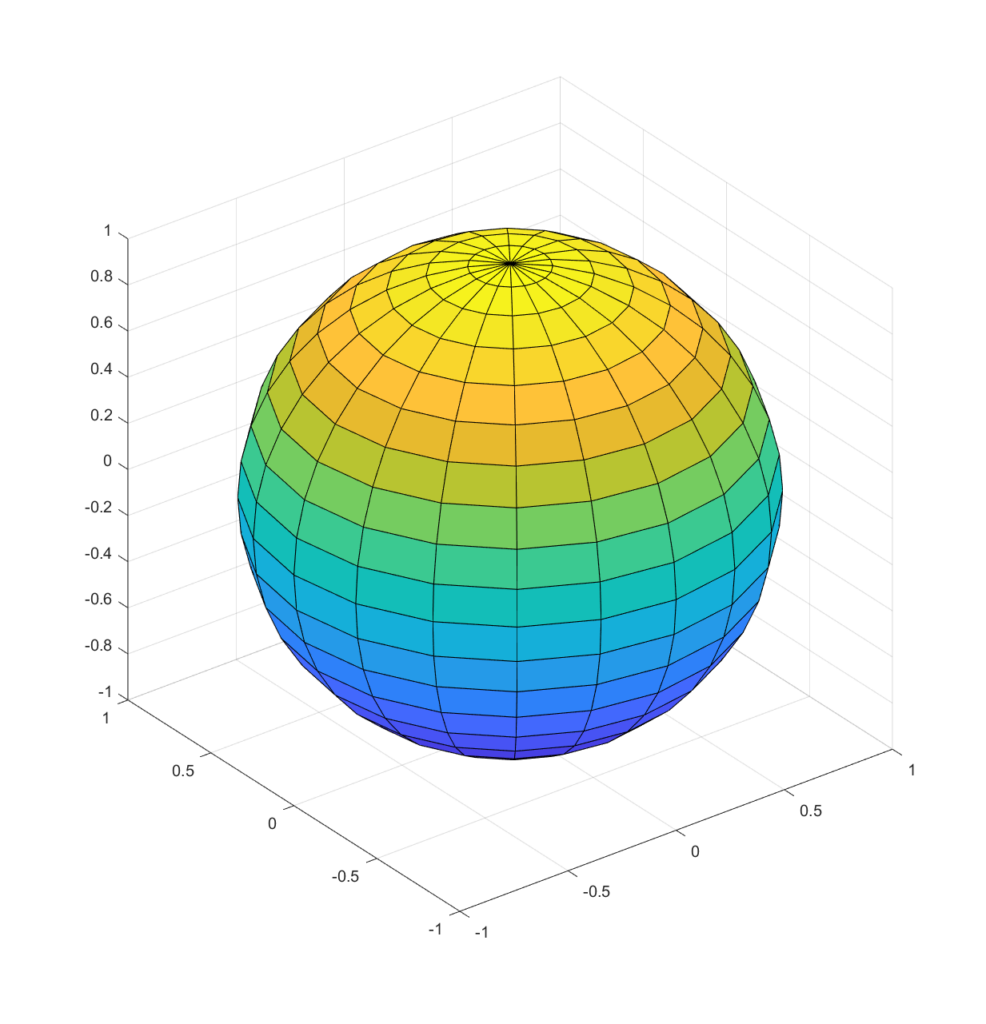
2.4. Elipsoide
Esta gráfica de una superficie cuadrática esta dada por la ecuación:
En muchas ocasiones se presentan situaciones que implican resolver ecuaciones simultaneas, y aunque existen muchas técnicas el uso de matrices ayuda a resolver estas ecuaciones de forma fácil y rápida, en este artículo Sistemas de Ecuaciones Simultaneas con Matrices en Álgebra Lineal aprenderás como resolver estos sistemas.
1. Sistema de ecuaciones usando Matrices en Álgebra Lineal
1.1. Eliminación de Gauss Jordan usando Matrices en Álgebra Lineal
El proceso de eliminación de Gauss – Jordan sirve para solucionar la anterior ecuación, para ello se debe escribir la matriz aumentada del sistema $\mathbf A$ seguida del vector $b$ de la siguiente manera:
Donde la idea es obtener una matriz escalonada reducida por reglones y pivote y luego utilizar una sustitución hacia adelante. Para lograr esta matriz se deben hacer tres operaciones fundamentales que puede ser:
Conmutación de filas
División de una fila por un escalar diferente de cero
Adicionar p veces una fila a otra
La notación para estas operaciones fundamentales con reglones es la siguiente:
$R_i \rightarrow cR_i$ Reemplaza la fila i-esima, por ella misma multiplicada por un escalar
$R_j \rightarrow R_j+cR_i$ Sustituye el j-esimo reglón por la suma del reglón $j$ más el reglón $i$ multiplicado por $c$
$R_j \leftrightarrows R_i$ Intercambia los reglones $i$ con el reglón $j$
Las matrices que se obtienen después de realizar una operación fundamental se denominan matrices equivalentes por reglones. Una matriz se encuentra en su forma escalonada reducida por reglones y pivote siempre que:
Si existe una fila de ceros esta es la última
El primer elemento para una fila que no es toda de ceros es uno
Para dos reglones que no todos sus elementos son ceros, entonces el primer uno en el reglón de más abajo también se encuentra más a la derecha.
Cualquier columna que contiene un uno y este uno es el primer elemento en el reglón donde aparece tiene ceros en el resto de sus posiciones. El primer uno para un reglón diferente de cero se llama pivote para el reglón
2. Sistemas homogéneos
Un sistema de ecuaciones se dice que es homogéneo cuando el vector bb tiene todas sus componentes en cero, y, por lo tanto, la matriz aumentada del sistema que le corresponde es la siguiente:
Todos los sistemas homogéneos tiene una solución trivial, es decir, la solución es entonces $x_1=x_2=0$. Para todo sistema homogéneo también se cumple que si tiene más incógnitas que ecuaciones ($n>m$) tiene un número infinito de soluciones. Para un sistema no homogéneo y su correspondiente sistema homogéneo, se pueden encontrar todas las soluciones teniendo en cuenta que si $\mathbf x_1$ es solución y $\mathbf x_2$ también es solución del sistema no homogéneo entonces $\mathbf x_1− \mathbf x_2$ es solución al sistema homogéneo relacionado. Lo anterior es muy útil y se puede representar como $\mathbf y= \mathbf x+ \mathbf h$ donde $\mathbf x$ e $\mathbf y$ es una solución del sistema no homogéneo y $\mathbf h$ es solución del sistema homogéneo, por lo tanto, para encontrar todas las soluciones al sistema no homogéneo basta con encontrar una solución del sistema no homogéneo y todas las soluciones del sistema homogéneo relacionado.
En el estudio de cualquier disciplina matemática un tema que es fundamental es comprender las bases geométricas que nos permiten trasladar lo que imaginamos al mundo real de lo que vemos y palpamos, en esta sección se explora las diferentes representaciones de las Rectas y Planos en Geometría.
Donde el vector $\mathbf v$ es un vector paralelo a $\overrightarrow {PR}$. Extendiendo los componentes se puede obtener las siguientes relaciones denominadas ecuaciones paramétricas de la recta:
$x=x_1+t(x_2-x_1)$
$y=y_1+t(y_2-y_1)$
$z=z_1+t(z_2-z_1)$
Si se despeja $t$ en las ecuaciones anteriores y se igualan definiendo $a=x_2−x_1$, $b=y_2−y_1$ y $c=z_2−z_1$ se obtienen las llamadas ecuaciones simétricas de la recta:
$\frac{x-x_1}{a}=\frac{y-y_1}{b}=\frac{z-z_1}{c}$
Tenga en cuenta que las ecuaciones paramétricas o simétricas de una recta no son únicas.
2. Planos
Los Rectas y Planos en Geometría se pueden definir de forma vectorial, para el caso de planos una forma es la siguiente: sea $P$ un punto y $\mathbf n$ un vector dado diferente de cero, el conjunto de puntos $Q$ que cumplen
$\overrightarrow{PQ}\cdot \mathbf n = 0$
se conoce como plano. Las siguientes ecuaciones son las ecuaciones cartesianas de un plano:
$ax+by+cz=d$
$\text{donde }d=ax_0+by_0+cz_0=\overrightarrow{OP}\cdot \mathbf n $
En estas ecuaciones los números $a$, $b$ y $c$ son las componentes del vector $\mathbf n$ normal al plano y los números $x_0$, $y_0$ y $z_0$ son los coordenadas del punto $P$. Finalmente una definición útil es que dos planos son paralelos si sus vectores normales lo son, es decir si el producto cruz de los vectores normales es cero.
Este post contiene un Catálogo, compendio o recopilación de las Funciones Matemáticas más utilizadas, su ecuación representativa, su gráfica y una descripción de su utilidad.
En el Catálogo de Funciones Matemáticas la primera a estudiar y más sencilla es la Lineal. En su forma más habitual está dada por la ecuación punto pendiente de la recta $f(x)=mx+b$. Estas funciones permiten establecer relaciones lineales entre la variable dependiente e independiente de manera que la proporción del crecimiento o decrecimiento de y respecto a variaciones en x se mantiene constante.
Figura 8. Función lineal $f(x)=x$
2. Funciones Polinomios
En su forma más general está dado por $P(x)=a_nx^n+a_{n−1}x^{n−1}+…+a_2x^2+a_1x+a_0$. Las funciones polinomiales incluyen todos los grados de los exponentes permitiendo establecer relaciones complejas entre la variable $x$ y $y$, sin embargo, las funciones polinomiales más habituales tiene grados pequeños como $2$ o $3$.
Figura 9. Polinomio de segundo grado $f(x)=x^2$
3. Funciones Potencia
Este es un caso particular de un polinomio en una forma más simple y permite representar parábolas o funciones recíprocas, ya que se debe considerar que el exponente puede ser negativo, su forma general es la siguiente $f(x)=x^a$
Figura 10. Función potencia $f(x)=x^3$
4. Funciones Racionales
Representan cocientes o relación de cantidades y se pueden escribir de la siguiente forma $f(x)=\frac{P(x)}{Q(x)}$ estos cocientes establecen relaciones complejas la gráfica muestra un ejemplo de este tipo de relaciones.
Figura 11. Función racional $f(x)=\frac{x−1}{x+1}$
5. Funciones Algebraicas
Son aquellas que están dadas por la combinación de operaciones aritméticas como suma, resta, multiplicación, o división por lo cual las funciones construidas con polinomios o funciones racionales son también algebraicas.
Figura 12. Función algebraica $f(x)=sqrtx{\frac{−1}{x+1}}$
6. Funciones Trigonométricas
Las funciones trigonométricas son adecuadas para describir comportamientos periódicos las funciones más comunes son $f(x)=sin(x)$, $f(x)=cos(x)$, $f(x)=tan(x)$ y sus respectivas funciones inversas.
Figura 13. Función trigonométrica $f(x)=sin(x)$
7. Funciones Exponenciales
Rn su forma más general está dado por $f(x)=a^x$. Estas funciones permiten modelamientos muy habituales de crecimientos por ejemplo la propagación de virus o crecimiento de poblaciones, así como otros procesos físicos. En particular cuando el exponente $x \approx 2,71$ la pendiente de la gráfica en $x=0$ es exactamente $1$ este número se llama $e$ y muy probablemente sea llamado así por ser la primera letra de la palabra exponential, Leonhard Euler en 1727 lo bautizó.
Figura 14. Función exponencial $f(x)=2^x$
8. Funciones Logarítmicas
En su forma más general está dado por $f(x)=log_a{x}$. Estas funciones permiten analizar crecimientos muy rápidos de funciones en escalas de un entendimiento más sencillo, un ejemplo de ello lo encontramos en las funciones que trabajan con unidades como decibelios.
Figura 15. Función logarítmica $f(x)=log_2{x}$
9. Funciones Trascendentes
Estas funciones incluyen otras como las trigonométricas, la exponencial y la logarítmica y muchas otras que no reciben ningún nombre.
Las Series en Matemáticas y Cálculo tiene muchas aplicaciones debido a su poder, por ejemplo podemos expresar funciones como series infinitas o simplificar cálculos, estas páginas contienen un resumen completo de las series, sus aplicaciones y definiciones.
Las sucesiones son números consecutivos que se escriben como:
$a_1,a_2.a_3,…,a_n$
Alternativamente una sucesión infinita se puede escribir de la siguiente manera: `{a_n}` Una sucesión `{a_n}` tiene límite `L` y se escribe:
$\lim_{n \to \infty}a_n=L$
Siempre y cuando podamos hacer los términos $a_n$ se acerquen a $L$ tanto como queramos al hacer $n$ lo suficientemente grande. Si el límite anterior existe se dice que la sucesión converge de lo contrario se dice que la sucesión es divergente. Por lo anterior todas las leyes de los límites son aplicables a las sucesiones, incluyendo el teorema de la compresión y el siguiente teorema que se da sin demostración
2. Teoremas y definiciones de Series en Matemáticas y Cálculo
2.1. Crecimiento y decrecimiento
Una sucesión ${a_n}$ es creciente si $a_n < a_{n+1}$ para toda $n \ge 1$
Una sucesión ${a_n}$ es decreciente si $a_n > a_{n+1}$ para toda $n \ge 1$
Una sucesión es monótona si es creciente o decreciente
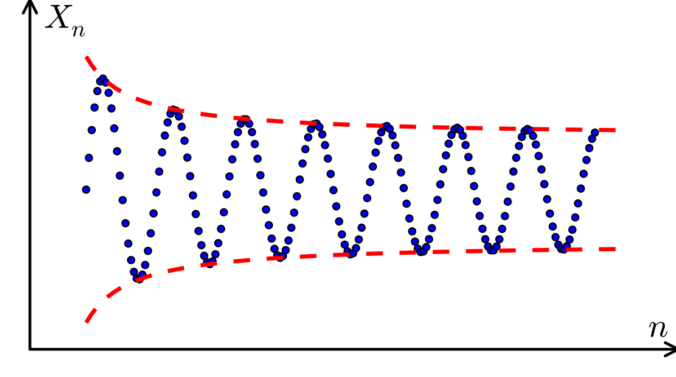
2.2. Acotamiento
Una sucesión ${a_n}$ está acotada por arriba si existe un número $M$ tal que $a_n \le M$ para toda $n \ge 1$.
Una sucesión ${a_n}$ está acotada por debajo si existe un número $m$ tal que $a_n \ge m$ para toda $n \ge 1$.
Si la sucesión está acotada por encima y por debajo se dice que la sucesión está acotada.
2.3. Teoremas
Si $\lim_{n \to \infty}|a_n|=0$ entonces $\lim_{n \to \infty}a_n=0$. La sucesión ${r^n}$ es convergente si $-1 \lt r \le 1$ y divergente para los demás valores de $r$. Toda sucesión acotada y monótona es convergente
3. Series en Matemáticas y Cálculo
Una serie se obtiene al sumar los términos de una sucesión y la cual se representa de la siguiente manera
$\sum_{n=1}^\infty a_n$
Dada una serie, se denota con $s_n$ a su n-ésima suma parcial:
$s_n=\sum_{i=1}^n {a_i}=a_1+a_2+a_3+ \dots +a_n$
Si la sucesión ${s_n}$ es convergente y si existe el $\lim_{n\to\infty}{s_n}=s$ como un número real, entonces la serie $\sum{a_n}$ se llama convergente y el número $s$ se denomina suma de la serie. En otro caso se entiende la serie como divergente.
3.1. Serie en Matemáticas: Serie Geométrica
La serie geométrica está dada por la siguiente expresión:
$\sum_{n=1}^{\infty}{ar^{n-a}}$
Esta serie converge siempre y cuando $|r| \lt 1$, en caso contrario diverge. Cuando la serie converge su suma es:
$\sum_{n=1}^{\infty}{ar^{n-a}}=\frac{a}{1-r}$
4. Serie Binomial
El teorema del binomio es una forma de factorización muy conocida y que se expresa como:
La notación tradicional de los coeficientes es la siguiente:
$\binom{k}{0}=1$
$\binom{k}{n}=\frac{k(k-1)(k-2)\dots(k-n+1)}{nª}\text{ con }n=1,2,3, \dots ,k$
La notación anterior permite escribir el teorema del binomio así:
$(a+b)^k=\sum_{n=0}^{k}\binom{k}{n}a^{k-n}b^n$
Considerando el caso particular $a=1$ y $b=x$:
$(1+x)^k=\sum_{n=0}^{k}\binom{k}{n}x^n$
Esta fórmula es bien conocida para números $k$ que sean enteros positivos. Utilizando series de potencias y la serie de Maclaurin se puede expresar esta serie para otros casos de $k$ siendo fraccionario o negativo. Si $k$ es un número real y $|x|<1$ entonces se puede expresar la serie binomial como:
Las Integrales en Cálculo son una poderosa herramienta que permite resolver un sin número de casos prácticos y modelar la naturaleza de forma muy precisa, su estudio esta presente en casi todas las ramas del conocimiento, aquí encontrarás material suficiente para estudiar las Integrales, entenderlas o repasarlas.
El problema del área bajo la curva se puede resolver inscribiendo rectángulos de base fija $\Delta x=\frac{b-a}{n}$ donde $n$ es el número de rectángulos que se inscriben en el intervalo $[a,b]$ de esta forma el área se obtiene sumando el área a individual de cada rectángulo y haciendo que $n \to \infty$ los rectángulos inscritos pueden tomarse con cualquier punto sobre la curva (puntos de muestra) por ejemplo se pueden tomar para que estén a la izquierda, a la derecha o en un punto medio. El área bajo la curva se puede obtener entonces evaluando el siguiente límite:
Note que para poder hallar esta área se requiere que la función sea continua.
2. Integrales en Cálculo
2.1. Integral definida
A continuación se presenta la definición de integral definida. Si $f$ es una función continua definida para $a \le x \le b$, dividimos el intervalo $[a,b]$ en $n$ subintervalos de igual ancho $\Delta x=\frac{b−a}{n}$. Hacemos que $x_0(=a),x_1,x_2,\dotso,x_n(=b)$ sean los puntos extremos de estos subintervalos y elegimos $x_i^*$⋅ se encuentre en el i-esimo subintervalo $[x_{i-1},x_{i}]$, entonces la integral definida de $f$ desde $a$ hasta $b$, es:
En la notación anterior se tiene los límites de la integral definida, la función y la variable que se quiere integrar $dx$, esta es la notación de Leibniz. De otra parte la sumatoria es conocida como Suma de Riemann. Como se anotó antes este límite siempre existe y es independiente de la elección de los puntos de muestra siempre y cuando pertenezcan al subintervalo correspondiente. Este límite también se puede hallar si $f$ posee discontinuidades de tipo salto, pero no de tipo infinito. En caso que la función a integrar tome valores negativos (este por debajo del eje $x$), durante esos intervalos el área de la función será considerada como negativa y al tomar la integral sobre un intervalo mayor que abarque porciones de la función donde sea negativa y positiva, la integral definida al ser evaluada corresponderá a una diferencia de áreas y, por lo tanto, en estos casos no puede ser interpretado el resultado como un área.
2.2 Regla del punto medio
Una forma de mejorar las aproximaciones obtenidas con la suma de Riemann consiste en utilizar los puntos medios de cada subintervalo, a este procedimiento se le conoce como regla del punto medio y establece que:
Si $f(x) \ge 0$ para $a \le x \le b$, entonces $`\int_a^bf(x)dx \ge 0$
Si $f(x) \ge g(x)$ para $a \le x \le b$, entonces $\int_a^bf(x)dx \ge \int_a^bg(x)dx$
Si $m \le f(x) \le M$ para $a \le x \le b$, entonces $m(b-a) \le \int_a^bf(x)dx \le M(b-a)$
4. Teorema de evaluación
Si $f$ es continua sobre el intervalo $[a,b]$ entonces:
$\int_a^bf(x)dx=F(b)-F(a)$
Donde $F$ es cualquier antiderivada de $f$, es decir, $F’=f$ Esta expresión se relaciona con el teorema fundamental del cálculo. Existen varias notaciones adicionales para expresar la evaluación de esta integral como la que se muestra a continuación:
La notación más conveniente para una antiderivada es una integral indefinida, que se escribe como:
$\int f(x)dx=F(x)$
Significa que $F'(x)=f(x)$ Note que una integral indefinida es una familia de funciones mientras que una integral definida es un número. Las integrales definidas e indefinidas se pueden relacionar mediante el siguiente resultado:
$\int_a^bf(x)dx=\int f(x)dx\biggr\rvert_a^b$
Las integrales indefinidas siguen las mismas propiedades de las integrales definidas, adicionalmente es conveniente contar con una breve tabla de integrales que permitan encontrar rápidamente las antiderivadas. A continuación, se provee una breve tabla.
$\int x^ndx=\frac{x^{n+1}}{n+a}+C \text{ con }n \ne -1$
$\int \frac{1}{x}dx=\ln |x|+C$
$\int e^xdx=e^x+C$
$\int \sin x dx=-\cos x+C$
$\int \cos x dx=\sin x+C$
$\int \sec^2xdx=\tan x+C$
$\int \csc^2xdx=-\cot x+C$
$\int \sec x \tan xdx=\sec x+C$
$\int \csc x \cot xdx=-\csc x +C$
$\int \frac{1}{\sqrt{1-x^2}}dx=\sin ^{-1}x+C$
$\int -\frac{1}{\sqrt{1-x^2}}dx=\cos ^{-1}x+C$
$\int \frac{1}{x^2+1}dx=\tan^{-1}x+C$
6. Teorema del cambio total
De los resultados anteriores se puede escribir el siguiente teorema denominado teorema del cambio total: La integral de una razón de cambio es el cambio total:
$\int_a^bF'(x)dx=F(b)-F(a)$
7. Teorema fundamental del cálculo
El teorema fundamental del cálculo relaciona las dos ramas del cálculo, cálculo diferencial y cálculo integral y muestra como el proceso de integración es contrario o inverso al proceso de derivación y viceversa. Para expresar este hecho con una formulación matemática se puede plantear de la siguiente manera: Sea $f$ una función continua sobre el intervalo cerrado $[a,b]$, luego la función definida por:
$A(x)=\int_a^xf(t)dt\text{ con }a\le x \le b$
Es una antiderivada de $f$, es decir, $A'(x)=f(x)$ De forma alternativa se puede utilizar la notación de Leibniz:
$\frac{d}{dx}\int_a^xf(t)dt=f(x)$
Adicionalmente el teorema fundamental del cálculo establece que:
$\int_a^bf(x)dx=F(b)-F(a)$
Donde $F$ es cualquier antiderivada de $f$. Lo anterior implica que el teorema de evaluación está incluido en el Teorema Fundamental del Cálculo. La siguiente imagen ilustra la función $A$ (función de acumulación).
Figura 2. Función de acumulación
8. Integrales en Cálculo impropias
Algo muy importante cuando se tienen integrales definidas es si estas se evalúan sobre un intervalo que o bien es infinito o bien la función tiene una discontinuidad infinita, en ambos casos la integral recibe el nombre de integral impropia y debe evaluarse utilizando límites. A continuación se muestran las diferentes formas en las que una integral impropia debe evaluarse.
9. Integrales impropias por intervalos infinitos
Esta integral es comúnmente conocida como integral impropia de tipo 1 y presenta tres casos.
Si $\int_a^tf(x)dx$ existe para todo número $t \ge a$ entonces
Donde $a$ es cualquier número real. Es importante realizar varias observaciones con este tipo de integrales. La primera de ellas consiste en que no se puede obviar las fórmulas dadas y estas integrales deben evaluarse a través del uso de límites para obtener resultados correctos. Otro resultado importante es el siguiente:
$\int_1^{\infty}\frac{1}{x}dx\text{ es divergente}$
$\int_1^{\infty}\frac{1}{x^2}dx\text{ es convergente}$
La siguiente gráfica muestra la función $f(x)=\frac{1}{x^2}$
Figura 3. Función $\frac{1}{x^2}
En términos generales se puede escribir:
$\int_1^{\infty}\frac{1}{x^p}dx\text{ converge si }p>1\text{ y diverge si }p \le 1$
10. Integrales impropias por discontinuidades infinitas
Esta integral es comúnmente conocida como integral impropia de tipo 2 y presenta tres casos.
Si $f$ es continua en $[a,b)$ y discontinua (infinitamente) en $b$ entonces
$\int_a^bf(x)dx=\lim_{t \to b^-}\int_a^tf(x)dx$
Si este limite existe.
Si $f$ es continua sobre $(a,b]$ y discontinua (infinitamente) en $a$ entonces
$\int_a^bf(x)dx=\lim_{t \to a^+}\int_t^bf(x)dx$
Si este límite existe.
Se dice que las integrales impropias son convergentes si el límite existe y divergentes si el límite no existe.
Si $f$ tiene un discontinuidad infinita en $c$ donde $a \lt c \lt b$ y tanto $\int_a^cf(c)dx$ como $\int_c^bf(x)dx$ son convergentes, entonces definimos
$\int_a^bf(x)dx=\int_a^cf(x)dx+\int_c^bf(x)dx$
11. Teorema de comparación
Este teorema es útil cuando no se puede calcular la integral impropia, pero se desea saber si es convergente o divergente, establece lo siguiente.
Suponga que $f$ y $g$ son funciones continuas $f(x) \ge g(x) \ge 0$ para $x \ge a$
Si $\int_a^{\infty}f(x)dx$ es convergente, entonces $\int_a^{\infty}g(x)dx$ también lo es.
Si $\int_a^{\infty}g(x)dx$ es divergente, entonces $\int_a^{\infty}f(x)dx$ también lo es.
Esta página recopila todo el material necesario para abordar los conceptos de Derivadas en Cálculo, sus definiciones, reglas y usos. En estas secciones solo se considera el caso de derivadas en una sola variable.
En una curva se puede trazar una recta secante que corte la curva en dos puntos, así las cosas la pendiente de esta recta esta dada por:
$m_{PQ}=\frac{f(p)-f(q)}{p-q}$
En el caso en que el punto $P$ se haga acercar al punto $Q$ de forma que la recta se transforme en tangente (toque la curva en un solo punto) se tendrá el siguiente cálculo de la pendiente de la recta:
$m=\lim_{x \to a}\frac{f(x)-f(a)}{x-a}$
Es importante advertir que este límite puede no existir en punto $x=a$ determinado. La siguiente gráfica ilustra ambas rectas:
Figura 1. Línea secante y tangente a una curva
La expresión para calcular la recta anterior se puede reescribir de la siguiente manera:
$\text{Sea }h=x-a \text{ y } x=a+h$
Entonces:
$m=\lim_{h \to 0}\frac{f(a+h)-f(a)}{h}$
1.2. Razones de cambio
Suponga que $y$ es una cantidad que depende de otra $x$, Por tanto, $y=f(x)$, Si $x$ cambia de $x_1$ a $x_2$ entonces se conoce como incremento a la cantidad representada por:
$\Delta x = x_1-x_2$
Se llama razón promedio de cambio de $y$ con respecto a $x$ sobre el intervalo $[x1,x2]$ al cociente de las diferencias:
$\text{razón promedio de cambio}=\frac{\Delta y}{\Delta x}=\frac{f(x_2)-f(x_1)}{x_2-x_1}$
Este se puede interpretar como la pendiente de la recta secante a $PQ$. De forma similar, si se toma el límite de la expresión anterior se obtiene la razón instantánea de cambio de $y$ respecto a $x$ así:
$\text{razón instantánea de cambio}=\lim_{\Delta x \to 0}\frac{\Delta y}{\Delta x}=\lim_{x_2 \to x_1}\frac{f(x_2)-f(x_1)}{x_2-x_1}$
2. Derivadas
Tal como se vio en la sección anterior sobre el cálculo de pendientes de rectas tangentes, y usando ese resultado se define: La derivada de una función $f$ en un punto $a$ y denotada $f'(a)$ como:
$f'(a)=\lim_{h \to 0}\frac{f(a+h)-f(a)}{h}$
Si el límite existe. Alternativamente se puede escribir:
$f'(a)=\lim_{x \to a}\frac{f(x)-f(a)}{x-a}$
De esta forma la derivada puede interpretarse de las siguientes formas:
La pendiente de la recta tangente de la función $f$ en el punto $a$
La razón instantánea de cambio de $f(x)$ con respecto a $x$ cuando $x=a$
3. Derivada como una función
Si bien es posible calcular la derivada de una función en un punto determinado también se puede calcular en cualquier punto $x$ y de esta forma obtener una nueva función denominada derivada de $f$, esta función está determinada por:
$f'(x)=\lim_{h \to 0}\frac{f(x+h)-f(x)}{h}$
A continuación se muestra gráficamente una función (rojo) y su correspondiente derivada (azul). Es importante observar que cuando la gráfica de la función tiene pendiente cero, la gráfica de la derivada corta el eje $x$.
Figura 2. La derivada como función
Algunas notaciones alternativas para representar la deriva se muestran a continuación:
$f'(x)=y’=\frac{dy}{dx}=\frac{df}{dx}=\frac{d}{dx}f(x)=Df(x)=D_Xf(x)=\lim_{\Delta x \to 0}\frac{\Delta y}{\Delta x}$
4. Funciones derivables y no derivables
Una función es derivable en $a$ si $f'(a)$ existe, también puede ser derivable en un intervalo abierto o cerrado si es derivable en todo número perteneciente al intervalo.
Teorema Si $f$ es derivable en $a$, $f$ es continua en $a$, note que el recíproco de este teorema es falso, es decir que una función sea continua no implica que esta sea derivable. En general una función no es derivable cuando presenta picos, o su recta tangente tiene una pendiente infinita, veamos un caso y para ello trate de calcular la derivada de la función valor absoluto:
$f(x)=|x|$
Cuya gráfica se presenta a continuación:
Figura 3. Gráfica del valor absoluto
En este caso:
$f'(x)=1 \text{ si } x>0 \text{ y }f'(x)=-1 \text{ si } x<0 $
Por lo tanto, no se tiene una recta pendiente para esta función en $x=0$. En resumen una función no es derivable en un punto $a$ si:
El límite de la definición de derivada no existe
La función no es continua en un punto $a$
La gráfica presenta picos en el punto $a$
La función presenta pendiente vertical en el punto $a$
5. Derivadas superiores
Si $f$ es una función derivable, entonces su derivada $f’$ también es una función, y, por lo tanto, $f’$ puede tener una derivada que se denota como:
Se llama segunda derivada de $f$. De forma similar se puede extender el concepto a terceras derivadas o n-ésimas derivadas de una función.
6. Interpretación alternativa de las derivadas
La primera derivada expresa la pendiente de la curva $f(x)$, por lo tanto, podemos concluir que:
Si la primera derivada es cero la función $f(x)$ tiene pendiente cero.
Si la primera derivada es positiva en un intervalo, $f(x)$ es creciente en ese intervalo.
Si la primera derivada es negativa en un intervalo, $f(x)$ es decreciente en ese intervalo.
La siguiente gráfica aclara este concepto:
Figura 4. Primera derivada
Note que en los puntos marcados como $a$ y $b$ la pendiente de la función (primera derivada) es cero. La segunda derivada también aporta información importante acerca de $f(x)$
Si la segunda derivada es cero existe en ese punto, un punto de inflexión para $f(x)$, es decir, un punto donde la concavidad de $f(x)$ cambia
Si la segunda derivada es positiva en un intervalo, la concavidad de $f(x)$ es hacia arriba en ese intervalo
Si la segunda derivada es negativa en un intervalo, la concavidad de $f(x)$ es hacia abajo en ese intervalo
La siguiente gráfica aclara este concepto:
Figura 5. Segunda derivada
Note que la segunda derivada indica si la primera derivada es creciente o decreciente.
7. Tangentes a curvas paramétricas
Si se tienen las ecuaciones de una curva paramétricas de la forma:
$x=f(t) \text{ y } y=g(t)$
Donde el parámetro $t$ varía, se puede calcular la pendiente de esta curva sin necesidad de eliminar el parámetro $t$ con la siguiente aplicación de la regla de la cadena.
Algunas ecuaciones son imposibles de resolver en términos de $y$, de forma que se puede hallar la derivada de una ecuación (como la de un círculo) sin necesidad de resolver la ecuación para $y$ derivando ambos lados de la ecuación y utilizando la regla de la cadena, este tipo de solución puede ahorrar mucho trabajo, pero es importante tener en cuenta la regla de la cadena.
9. Trayectorias ortogonales
Dos funciones (o familias de funciones) pueden ser ortogonales si en cada punto de intersección las pendientes de las rectas tangentes en esos puntos son perpendiculares. Recuerde que dos rectas son perpendiculares siempre y cuando sus pendientes multiplicadas den $-1$
10. Aproximaciones lineales
En ocasiones es conveniente trabajar con aproximaciones de funciones en lugar de la función como tal, esto se puede hacer porque la recta tangente en un punto aa es muy similar a la función cerca del punto aa, Se conoce como linealización de $f$ en $a$ a la ecuación de la recta tangente en ese punto. La linealización de una curva $f$ en $a$ se denota como $L$ y se puede obtener así:
Los límites se han estudiado desde hace milenios con problemas muy famosos como el de la distancia o el de la tortuga y la liebre que contradicen el sentido común, solo hasta que se instauro el Límite en el Cálculo se pudo comprender la solución de estos problemas.
Los límites aparecen en muchos ejemplos, uno de los más representativos es el problema de la pendiente, en el cual se quiere hallar la recta tangente a un punto de una curva, para ello se seleccionan dos puntos muy cercanos de la curva y se calcula la pendiente de la recta que pasa por esos puntos.
Figura 1. Línea secante a una curva
Acercar los puntos cada vez más conlleva a los límites, que se puede escribir como:
$\lim_{Q \to P}m_{PQ}$
En forma más general el límite de una función f$(x)$ cuando $x$ tiende a $a$ es igual $L$ y se denota como:
$\lim_{x \to a}f(x)=L$
Si podemos acercar arbitrariamente los valores de $f(x)$ a $L$ (tanto como deseemos) escogiendo una xx lo bastante cerca de $a$, pero no igual a $a$
2. Límites en Cálculo laterales
Se escribe:
$\lim_{x \to a^-}f(x)=L$
y se dice que el límite izquierdo de $f(x)$ cuando $x$ tiende a $a$ es igual a $L$, si se puede aproximar los valores de $f(x)$ a $L$ tanto como queramos, escogiendo una $x$ lo bastante cerca de $a$ pero menor que $a$. Similarmente el limite
$\lim_{x \to a^+}f(x)=L$
pero en esta ocasión escogiendo una $x$ lo bastante cerca de $a$ pero mayor que $a$. A los anteriores límites se les conoce como límites laterales. Como consecuencia de sus definiciones se tiene que:
$\lim_{x \to a}f(x)=L \text{ si y sólo si } \lim_{x \to a^-}f(x)=L \text{ y } \lim_{x \to a^+}f(x)=L$
3. Leyes de los Límites en Cálculo
Algunas leyes de límites ayudan al cálculo de los mismos, a continuación se presentan estas leyes. Suponiendo que $c$ es una constante y que $\lim_{x \to a}f(x)=L_1$ y $\lim_{x \to a}f(x)=L_2$ existen entonces:
$\lim_{x \to a}x^n=a^n \text{ con }n\in\mathbb{Z}^+$
$\lim_{x \to a}\sqrt[n]{f(x)}=\sqrt[n]{\lim_{x \to a}f(x)} \text{ con }n\in\mathbb{Z}^+$
4. Propiedad de sustitución
Si $f$ es un polinomio o una función racional y $a$ está en el dominio de $f$, entonces:
$\lim_{x \to a}f(x)=f(a)$
Otra importante y útil hecho acerca de los límites expresa que en ocasiones no se puede hallar el límite de una función, pero tal vez se pueda simplificar y hallar el límite de la función más sencilla, entonces Si $f(x)=g(x)$ cuando $x \ne a$ entonces $\lim_{x \to a}f(x)=\lim_{x \to a}g(x)$, en caso que exista el límite, esto sucede porque se considera el límite es cuando $x$ se aproxima a $a$ y no cuando $x$ en realidad es igual a $a$. Lo anterior permite simplificar una función y hallar el límite de la función más simple.
5. Teorema de la compresión
Antes de definir el teorema de la compresión, el cual es muy útil, consideremos el siguiente teorema:
Si $f(x) \leq g(x)$, cuando $x$ está cerca de $a$ (excepto posiblemente en $a$), y los límites de $f$ y $g$ existen cuando $x$ tiende a $a$:
$\lim_{x \to a}f(x) \leq \lim_{x \to a}g(x)$
El teorema de la compresión entonces plantea que:
Si $f(x) \leq g(x) \leq h(x)$, cuando $x$ está cerca de $a$ (excepto posiblemente en $a$), y los límites de $f$ y $h$ existen cuando $x$ tiende a $a$ y son iguales, es decir:
$\lim_{x \to a}f(x) = \lim_{x \to a}h(x) = L$
entonces:
$\lim_{x \to a}g(x)=L$
6. Continuidad de funciones
Una función $f$ es continua en un número $a$ si:
$\lim_{x \to a}f(x)=f(a)$
La anterior definición requiere dos hechos cosas:
$f(a)$ está definido, es decir, $a\in\text{dominio de}f$
$\lim_{x\to a}f(x)$ existe, de modo que $f$ debe estar definida en un intervalo abierto que contenga $a$
De forma similar se puede alterar un poco la definición y decir que $f$ es continua desde la derecha en un número $a$ si:
$\lim_{x \to a^+}f(x)=f(a)$
Y continua desde la izquierda en un número $a$ si:
$\lim_{x \to a^-}f(x)=f(a)$
La función $f$ es continua sobre un intervalo si es continua en todo número en el intervalo, entendiendo en los puntos extremos del intervalo que la función es continua desde la derecha o continua desde la izquierda. Las discontinuidades de una función pueden darse por varios hechos como son:
Discontinuidad en el infinito, cuando la función presenta asíntotas verticales
Discontinuidad por salto, aquellas que son producto de por ejemplo funciones piso o techo
Discontinuidad removible, aquellas que pueden solventar redefiniendo la función.
7. Teoremas y propiedades de los Límites en Cálculo
Algunos resultados importantes de la continuidad de funciones se recopilan a continuación: Si $f$ y $g$ son continuas en $a$ y $c$ es una constante entonces:
$f+g$ es continua
$f−g$ es continua
$cf$ es continua
$fg$ es continua
$\frac{f}{g}$ si $g(a) \ne 0$ es continua
Cualquier polinomio es continuo en $\mathbb R$
Cualquier función racional es continua, siempre que esté definida, es decir es continua en su dominio; sucede lo mismo con las funciones raíz, trigonométricas, trigonométricas inversas, exponenciales y logaritmos
Si $f$ es continua en $b$ y $\lim_{x \to a}g(x)=b$, entonces, $\lim_{x\to a}f(g(x))=f(b)$ en otras palabras:
$\lim_{x\to a}f(g(x))=f(\lim_{x\to a}g(x))$
Si $g$ es continua en $a$ y $f$ es continua en $g(a)$, entonces la función compuesta $f\circ g(x)=f(g(x))$ es continua en $a$
Finalmente se presenta el teorema del valor intermedio: suponga que $f$ es continua sobre el intervalo cerrado $[a,b]$ y sea $N$ cualquier número entre $f(a)$ y $f(b)$ donde $f(a) \ne f(b)$, entonces existe un número $c$ en $(a,b)$ tal que $f(c)=N$
8. Límites en el infinito
Una función como $f(x)=\frac{1}{x^2}$ presenta comportamientos como el que se muestra en la siguiente gráfica:
Figura 2. Gráfico de función
Cuando la función se acerca a cero los valores se pueden hacer tan grandes como se desee. Lo anterior se representa como:
$\lim_{x \to a}f(x)=\infty$
Quiere decir que la función puede tomar valores arbitrariamente grandes (tan grandes como se quiera) eligiendo una $x$ lo suficientemente cercana a $a$ pero no igual a $a$
8.1. Asíntota vertical
La recta $x=a$ se conoce como asíntota vertical de la función $f(x)$ siempre y cuando se cumpla por lo menos una de las siguientes proposiciones:
$\lim_{x \to a}f(x)=\infty$
$\lim_{x \to a^-}f(x)=\infty$
$\lim_{x \to a^+}f(x)=\infty$
$\lim_{x \to a}f(x)=-\infty$
$\lim_{x \to a^-}f(x)=-\infty$
$\lim_{x \to a^+}f(x)=-\infty$
Otro caso importante de estudio consiste en la función
$f(x)=\frac{x^2-1}{x^2+1}$
En esta función conforme los valores de $x$ crecen más (positiva y negativamente) el valor de la función se acerca más a $1$. Por lo tanto se puede expresar que:
$\lim_{x \to \infty}\frac{x^2-1}{x^2+1}=1$
De manera que sea una función $f$ definida en algún intervalo $(a,\infty )$ entonces:
$\lim_{x \to \infty}f(x)=L$
8.2. Asíntota horizontal
Se llama asíntota horizontal de $f(x)$ a la recta $y=L$ siempre y cuando se cumpla alguna de las siguientes proposiciones:
$\lim_{x \to \infty}f(x)=L$
$\lim_{x \to -\infty}f(x)=L$
9. Resultados importantes
Algunos resultados importantes que se obtienen en el estudio de límites en el infinito son los siguientes:
$\lim_{x \to \infty}\frac{1}{x^n}=0$
$\lim_{x \to -\infty}\frac{1}{x^n}=0$
$\lim_{x \to -\infty}e^x=0$ También es cierto para cualquier base $a$ con $a>0$
10. Regla de L’Hopital
Esta regla permite calcular límites de forma fácil y para ello se hace uso de la derivación. La regla funciona para las siguientes formas indeterminadas, es decir límites que arrojan resultados como: $\frac{0}{0}$ o $\frac{\infty}{\infty}$ o $0 \cdot \infty$ o $\infty – \infty$ o $0^0$ o $\infty^\infty$ o $1^\infty$
La regla afirma que: suponga que $f$ y $g$ son derivables y que $g'(x) \ne 0$ cerca de $a$ excepto quizás en $a$, suponga que:
$\lim_{x \to a}f(x)=0 \text{ y }\lim_{x \to a}g(x)=0$
o que
$\lim_{x \to a}f(x)=\pm\infty \text{ y }\lim_{x \to a}g(x)=\pm\infty$
En otras palabras se tiene la forma indeterminada $\frac{0}{0}` o `\frac{\infty}{\infty}$ entonces:
En el caso de la forma indeterminada del producto puede llevarse a una de las formas indeterminadas expresadas en la regla de L’Hopital si se recurre a la siguiente modificación:
$fg=\frac{f}{\frac{1}{g}}$
En el caso de las diferencias indeterminadas, también se debe recurrir alguna modificación, por ejemplo sacando algún factor común o racionalizando de manera que la forma indeterminada quede expresada en término de la regla de L’Hopital. Finalmente, para el caso de las potencias indeterminadas puede recurrir al logaritmo natural de manera que se lleve a un producto indeterminado, se proceda calculando el límite y finalmente tomando el exponencial del resultado.
En estas páginas encontraras el material necesario para comprender las diferentes Funciones Matemáticas, además de un catalogo completo con sus correspondientes usos y aplicaciones.
Las funciones aparecen cuando existen cantidades que dependen unas de las otras, normalmente se ha definido una función como una regla que asigna a cada elemento $x$ de un conjunto $A$ exactamente un elemento llamado $f(x)$f de otro conjunto $B$. En este punto tenemos algunas definiciones convenientes que realizar en el manejo de las funciones:
Dominio: este concepto corresponde al mismo conjunto $A$
Rango: este concepto corresponde al mismo conjunto $B$
Variable independiente: variable que representa un elemento arbitrario del conjunto $A$ (dominio)
Variable dependiente: variable que representa un elemento en el rango de $f$
Las funciones matemáticas se pueden representar de distintas maneras incluyendo:
Verbalmente (usando una descripción en prosa), numéricamente (con una tabla de valores)
Visualmente (con una gráfica) o algebraicamente (con una fórmula o ecuación).
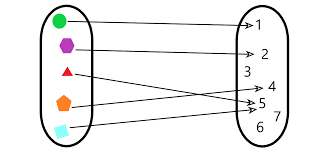
La última es la forma más habitual y conveniente para expresar funciones, así mismo se puede visualizar la función recurriendo a la visualización como regla de asignación entre conjuntos, más formalmente tendríamos que si $f$ es una función cuyo dominio es $A$ su gráfica son las parejas ordenadas
$\{(x,f(x))x \in A\}$
Y su correspondiente diagrama de flechas es como el de la figura 1.
Figura 1. Diagrama de flechas para funciones
1.1. Prueba de recta vertical
Ahora bien, es importante notar que la definición de función implica que la asignación del conjunto del dominio al conjunto del rango, no realice asignaciones de forma tal que un mismo elemento del dominio asigne dos valores diferentes del rango, gráficamente esto se puede ver fácilmente mediante la Prueba de la recta vertical de tal manera que si se traza una línea vertical en el gráfico de una función esta corte la gráfica en un solo punto. De tal manera, la gráfica 2 corresponde a una parabola pero no a una función.
Figura 2. Gráfico de una curva que no es función
1.2. Funciones por secciones
Otra forma de definir funciones es utilizando la definición de funciones matemáticas por secciones, de estas funciones la más conocida es la función valor absoluto, la cual se muestra en la figura 3. De esta forma se puede definir funciones de una manera muy flexible, por ejemplo la función escalón es una de ellas.
Figura 3. Función valor absoluto
1.1. Simetría
Existen dos tipos de simetría para las Funciones Matemáticas, la simetría par y la simetría impar. La primera es cuando se cumple la condición f(−x)=f(x)f(-x)=f(x) y la segunda f(−x)=−f(x)f(-x)=-f(x), gráficamente se pueden observar estas simetrías siendo la simetría par una simetría respecto al eje yy en una gráfica en el plano cartesiano y la simetría impar una simetría respecto al origen en el plano cartesiano, las figuras 4 y 5 muestras estas simetrías respectivamente.
Figura 4. Simetría par
Figura 5. Simetría impar
1.2. Funciones Matemáticas crecientes y decrecientes
Estas dos definiciones permiten ver el comportamiento de una función en un intervalo del dominio II, de tal manera que una función es
Creciente: si se cumple que $f(x_1) \lt f(x_2)$ siempre que $x_1 \lt x_2$ en $I$
Decreciente: si se cumple que $f(x_1) \gt f(x_2)$ siempre que $x_1 \gt x_2$ en $I$
Las gráficas 6 y 7 muestran respectivamente funciones crecientes y decrecientes.
Figura 6. Función creciente
Figura 7. Función decreciente
2. Transformación de Funciones
Las transformaciones de Funciones Matemáticas son muy útiles, puesto que permiten construir funciones que a primera mano parecen muy complejas usando funciones básicas, lo anterior ayuda a imaginarnos las gráficas de las funciones con las que se trabaja fácilmente.
2.1. Desplazamientos verticales y horizontales
A continuación se listan los diferentes desplazamientos que se pueden realizar partiendo de una constante $c \gt 0$ y la función $y=f(x)$
Hacia abajo: $y=f(x)−c$
Hacia arriba: $y=f(x)+c$
Hacia la izquierda: $y=f(x+c)$
Hacia la derecha: $y=f(x−c)$
2.2. Alargamientos y reflexiones
A continuación se listan los diferentes operaciones de alargamiento y compresión que se pueden realizar partiendo de una constante $c \gt 1$ y la función $y=f(x)$
Alargamiento vertical: $y=cf(x)$
Compresión vertical: $y=(\frac{1}{c})f(x)$
Compresión horizontal: $y=f(cx)$
Alargamiento vertical: $y=f(\frac{x}{c})$
Reflexión respecto a x: $y=−f(x)$
Reflexión respecto a y: $y=f(−x)$
2.3. Algebra de funciones
Las funciones se pueden operar usando los operadores algebraicos tradicionales para obtener nuevas funciones, de forma similar existe una operación llamada composición de funciones estas operaciones se muestran a continuación para las funciones $f(x)$ y $g(x)$
Suma de funciones: $(f+g)(x)=f(x)+g(x)$ dominio $A \cap B$
Resta de funciones: $(f−g)(x)=f(x)−g(x)$ dominio $A \cap B$
Multiplicación de funciones: $(fg)(x)=f(x)g(x)$ dominio $A \cap B$
División de funciones: $(\frac{f}{g})(x)=\frac{f(x)}{g(x)}$ dominio ${x \in A \cap B | g(x) \ne 0}$
Composición de funciones: $f(u)=f(g(x))$ que también se escribe como $(f \circ g)(x)=f(g(x))$
3. Curvas paramétricas
En ocasiones las funciones pueden escribirse en términos de sus componentes en los ejes $x$ e $y$, para ellos se expresan en dos ecuaciones como sigue:
$x=f(t) \text{ ; } y=g(t)$
La variable $t$ se conoce como parámetro. Es importante notar que estas expresiones pueden dar lugar a un concepto más general que el de función debido a que si se despeja $t$ en las ecuaciones anteriores y se igualan el resultado puede no superar la prueba de la línea vertical y como consecuencia obtener una relación, para ello se utiliza el término más general curva. Considere como ejemplo el caso de las curvas paramétricas de un círculo de centro $(h,k)$ y radio $r$:
$x=h+r\sin(t) \text{ ; } y=k+r\cos(t)$
4. Funciones inversas
Antes de definir la función inversa, definamos una función uno a uno (ver correspondencia de funciones) como aquella función que nunca adopta el mismo valor dos veces:
$f(x_1) \ne f(x_2) \text{ siempre que } x_1 \neq x_2$
Otra forma de definir si una función es uno a uno es a través de la prueba de la recta horizontal, en este sentido una recta horizontal trazada sobre la gráfica de la función solamente la puede cortar una sola vez. Se define la función inversa siendo $f$ una función uno a uno con dominio $A$ y rango $B$, luego la función inversa $f^{−1}$ tiene rango $A$ y dominio $B$ y se define mediante:
$f^{-1}(y)=x \Leftrightarrow f(x)=y$
La función inversa implica las siguientes expresiones:
$f^{-1}(f(x))=x \text{ ; }\forall x \in A$
$f(f^{-1}(x))=x \text{ ; }\forall x \in B$
Para hallar la función inversa se debe resolver a xx en término de yy siempre y cuando sea posible.
5. Correspondencia de funciones
A continuación se estudia las principales correspondencias de funciones, como son: unívoca, biunívoca, inyectiva, biyectiva, sobreyectiva; las primeras correspondencias entre funciones (unívoca, biunívoca) tratan los conceptos más generales aplicados a conjuntos, pero también pueden entenderse desde el punto de vista de las funciones y en este caso las correspondencias se denominan aplicaciones, teniendo los casos inyectiva, biyectiva y sobreyectiva que se resumen a continuación. Considere $A$ el dominio de una función $f$ cuyo rango es $B$
5.1. Funciones inyectivas
Una función es inyectiva si a elementos diferentes del dominio asigna elementos diferentes del rango, formalmente las funciones inyectivas se definen como:
$a\text{ , }a’ \in A\text{ y }a \neq a’\text{ entonces }f(a) \neq f(a’)$
5.2. Funciones sobreyectivas
Las funciones sobreyectivas también son denominadas funciones suprayectivas, epiyectivas, suryectiva, exhaustiva o subyectivas y se definen como aquellas funciones que para todo número en el rango tienen un correspondiente valor en el dominio, formalmente se define como:
$\forall b \in B \text{ } \exists \text{ } a \in A \text{ con }f(a)=b$
La función también puede ser no sobreyectiva si la anterior premisa no se cumple.
6.3. Funciones biyectivas
Estas funciones también se denominan uno a uno, y son aquellas que son inyectivas y sobreyectivas al mismo tiempo.