El Cálculo Vectorial es una de las ramas con más aplicaciones del cálculo, permite calcular flujos y entender muchos fenómenos físicos que han sido modelados con esta potente herramienta. En esta entrada se abordan los diferentes conceptos clave y teoremas que han sido resultado de esta rama de las matemáticas.
Si quieres aprender desde cero temas básicos de cálculo puedes seguir este enlace.
1. Campos escalares y vectoriales
Un campo vectorial es una función $F$ que asigna a un punto en $\mathbb R^2$ o $\mathbb R^3$ un vector. Este campo se puede escribir como:
$\mathbf F=P(x,y)\mathbf i +Q(x,y)\mathbf j$
Donde las funciones $P$ y $Q$ se conocen como campos escalares.
1.1. Campos gradientes
Si verificamos nuevamente la definicion de gradiente, encontramos que esta dado por:
$\nabla f(x,y)=f_x(x,y)\mathbf i+f_y(x,y)\mathbf j$
Por lo cual se puede apreciar que el campo gradiente en realidad es un campo vectorial.
Note que el campo gradiente de una función $f(x,y)$, que corresponde a una superficie en el espacio, es un campo en el plano, donde cada vector señala la máxima dirección de crecimiento de la superficie en el espacio.
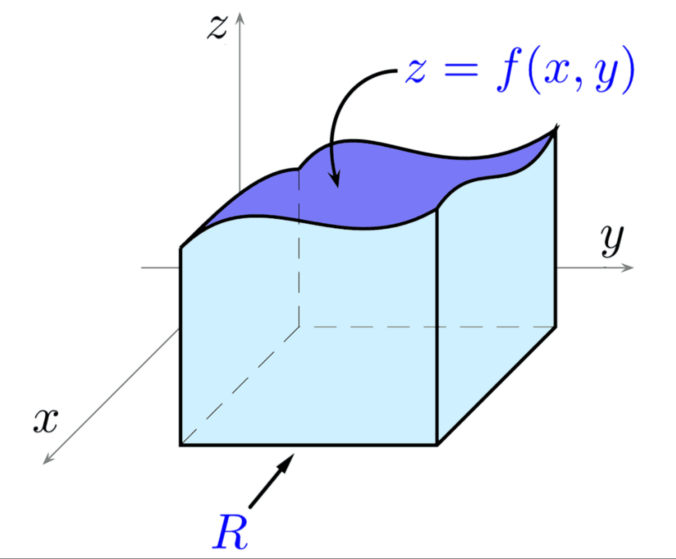
2. Integrales de línea
Las integrales de superficies se pueden calcular caudndo en el plano se tiene una region $D$ sobre la cual se quiere integrar o cuando se integra sobre uno de los ejes. Sin embargo es posible encontrar una integral de línea o también conocida como de curva o cortina dado una curva en el plano y la respectiva superficie a integrar, es algo similar a calcular el a´rea bajo la curva en el plano proyectada sobre la superficie a integrar.
La siguiente ecuación permite realizar el cálculo de esta integral de línea.
$\int_c f(x,y)ds=\int_a^bf(x(t),y(t))\sqrt{(\frac{dx}{dt})^2+(\frac{dyt}{dy})^2}dt$
Note como la superficie a integrar ha sido escrita como una parametrización de $t$ y que además la integral de la raíz cuadrada cooressponde a la longitud de arco.
En caso que las integrales de línea se calculen sobre los ejes $x$ e $y$ podemos escribir:
$\int_c{(x,y)}dx+\int_c{Q(x,y)}dy=\int_c{P(x,y)dx+Q(x,y)dy}$
Note que este caso no se parametrizó la superificie.
La parametrización de la superficie puede ser el mayor reto, en ocasiones es conveniente recordar la parametrización de un segmento de línea que comienza en $\mathbf r_0$ y termina en $\mathbf r _1$, con $0 \leq t \leq 1$:
$\mathbf r(t)=(1-t)\mathbf r_0+t\mathbf r_1$
En general, la parametrización determina una orientación de la curva $C$ en la dirección positiva que corresponde a un incremento del parametro $t$
2.1. Integrales de línea de campos escalares y vectoriales
Las integrales mencionadas anteriormente requieren de una curva en el plan y una superficie en el espacio, sin embargo las integrales de línea también se pueden calcular si se tiene en el plano un campo vectorial y una curva $C$ sobre el mismo dada por la función vectorial $\mathbf r(t)$ con $a \leq t \leq b$. Esta integral de línea a lo largo de $C$ se escribe así:
$\int_C \mathbf F \cdot d\mathbf r=\int_a^b{\mathbf F(\mathbf r(t)) \cdot \mathbf r'(t)dt}=\int_C\mathbf F \cdot \mathbf T ds$
Note que $\mathbf F(\mathbf r(t)$ es una forma abreviada de escribir $\mathbf F(x(t),y(t),z(t))$.
Así mismo, se puede obtener las siguiente relación entre las integrales de linea sobre campos vectoriales e integrales de línea de campos escalares.
$\int_c \mathbf F \cdot d\mathbf r=\int_C Pdx+Qdy+Rdz$
Con $\mathbf F=P\mathbf i + Q\mathbf j + R\mathbf k$
Interpretación: en este caso note que la integral de línea no es un área bajo la curva, en este caso, si $\mathbf F$ y $\mathbf r$ que es el vector que representa la curva, si ambos estan en el plano, esta integral de línea del producto punto del campo vectorial y el vector que describe la curva se puede interpretar como la suma delas contribuciones infinitesimales de cada producto punto entre el campo vectorial y el cetor de la curva para cada punto sobre la curva.
2.2. Teorema fundamental de las integrales de línea
Este teorema establece que si la integral del línea del campo vectorial, corresponde a un campo vectorial gradiente, solomante es necesario obtener la diferencia de los valores de la función en los extremos de la curva:
$\int_c\nabla f\cdot \mathbf r=f(\mathbf r(b))-f(\mathbf r(a))$
2.3. Independencia de la trayectoria
Del teorema anterior se desprenden algunas consecuencias importantes y definiciones que se recopilan a continuación.
En primer lugar, se establece la independencia de la trayectoria, es decir, el resultado de la intelgral de línea no depende de la curva, si en una región $D$:
$\int_C\mathbf F \cdot d\mathbf r=0$
para toda trayectoria cerrada $C$ en $D$.
Además, si $\mathbf F$ es un campo vectorial continuo en una region abierta y conexa $D$. Si $\int_C\mathbf F\cdot d\mathbf r$ es independiente de la trayectoria en $D$ entonces se dice que $\mathbf F$ es un campo vectorial conservativo sobre $D$, en otras palabras existe la función potencial $f$ que genera $\nabla f=\mathbf F$.
Adicionalmente, si $\mathbf F=P(x,y)\mathbf i + Q(x,y)\mathbf j$ es un campo vectorial conservativo y $P$ y $Q$ tienen derivadas parciales de primer orden continuas sobre un dominio $D$ entonces:
$\frac{\partial P}{\partial y}=\frac{\partial Q}{\partial x}$
Definamos una curva simple como aquella que no se cruza a si misma, adicionalmente podemos definir curvas simples abiertas y cerradas y una región simplemente conexa si la región no tiene “huecos”.
Con $\mathbf F=P(x,y)\mathbf i + Q(x,y)\mathbf j$ un campo vectorial sobre una region abierta simplemente conexa en $D$ y con $P$ y $Q$ con derivadas parciales de primer orden continuas y además:
$\frac{\partial P}{\partial y}=\frac{\partial Q}{\partial x}$
Entonces, $\mathbf F$ es conservativo.
3. Teorema de Green
El teorema de Green establece una relación entre las integrales de línea, cuando la curva sobre la que se integra encierra una área y una integral doble sobre esa área. En este sentido, la región encerrada por la curva debe ser recorrida por el vector $\mathbf r$ en sentido antihorario, siendo esta la convención conocida como orientación positiva de la región.
$\int_C\mathbf F \cdot d \mathbf r= \int_C Pdx+Qdy = \iint_D(\frac{\partial Q}{\partial X}-\frac{\partial P}{\partial y})dA$
Este teorema se considera como una extensión del teorema fundamental del cálculo y la integral anterior se puede escribir como sigue a continuacion para indicar que la integral de línea se calcula sobre la orientación positiva de la curva cerrada $C$.
$\oint_C Pdx+Qdy$
El teorema de Green provee la siguiente formula para el cálculo del área:
$A=\oint_C xdy=-\oint_C ydx=\frac{1}{2}\oint_C xdy-ydx$
4. Rotacional y Divergencia
Rotacional
El rotacional es una operación sobre vectores que produce un campo vectorial y que se escribe usando el producto cruz de las operaciones con vectores. La forma de calcular el rotacional y su notación se muestra a continuación.
$rot \mathbf F=\nabla \times \mathbf F=(\frac{\partial R}{\partial y}-\frac{\partial Q}{\partial z})\mathbf i+(\frac{\partial P}{\partial z}-\frac{\partial R}{\partial x})\mathbf j+(\frac{\partial Q}{\partial x}-\frac{\partial P}{\partial y})\mathbf k$
Note que el operador nabla, que se uso para describir el vector gradiente se puede entender como la siguiente operacion:
$\nabla=\mathbf i\frac{\partial}{\partial x} + \mathbf j\frac{\partial}{\partial y} + \mathbf k\frac{\partial}{\partial z}$
Algunos resultados del rotacional implica lo siguiente:
- El rotacional del gradiente es cero: $\nabla \times (\nabla f) = 0$
- Un campo vectorial con derivadas parciales continuas y si $\nabla \mathbf F = 0$ entonces $\mathbf F$ es un campo vectorial conservativo.
Divergencia
Esta operación produce un campo escalar y usa el producto punto de las operaciones vectoriales. Se define como se muestra a continuación:
$\nabla \cdot \mathbf F=\frac{\partial P}{\partial x}+\frac{\partial Q}{\partial y}+\frac{\partial R}{\partial z}$
En este caso si el campo vectorial tiene derivadas parciales continuas de segundo orden entonces:
$\nabla \cdot \nabla \times \mathbf F=0$
Teorema de Green
Usando las operaciones vectoriales se puede volver a escribir el teorema de Green usando el rotacional y la divergencia:
$\oint_C \mathbf F \cdot d\mathbf r=\iint_D(\nabla \times \mathbf F) \cdot \mathbf k dA$
$\oint_C \mathbf F \cdot \mathbf n ds=\iint_D(\nabla \cdot \mathbf F) dA$
5. Integrales de Superficie
las integrales de superficie son el equivalente de las integrales de línea pero en una dimensión superior, en este caso las integrales de superficie permiten calcular las sumatoria de las contribuciones de un campo vectorial a través de una superficie, lo cual se puede escribir así:
$\iint_S f(x,y,z)dS = \iint_D f(\mathbf r(u,v))|\mathbf r_u \times \mathbf r_v|dA$
Observe que esta no es la misma área superficial, así como la integral de línea no es el área bajo la superficie delimitada por la curva. Estas integrales son muy utilizadas en cálculos de campos y flujos como los electromagnéticos.
Si la parametrización es $x=x$, $y=y$ y $z=g(x,y)$ esta integral de superficie es:
$\iint_S f(x,y,z)dS = \iint_D f(x,y,g(x,y))\sqrt{(\frac{\partial z}{\partial x})^2+(\frac{\partial z}{\partial y})^2+1}dA$
La integral de superficie para campos vectoriales requerira el vector normal unitario a la superficie, que para una superficie cerrada la convencio es que estos vecotores son positivos cuando apuntan hacia afuera de la superficie, esto se conoce como orientación positiva de la superficie. Con:
$\mathbf n=\frac{\mathbf r_u \times \mathbf r_v}{|\mathbf r_u \times \mathbf r_v|}$
Se puede calcular las integrales de superficie usando los siguientes resultados:
$\iint_S \mathbf F \cdot d\mathbf S=\iint_S\mathbf F \cdot \mathbf n dS$
$\iint_S \mathbf F \cdot d\mathbf S=\iint_D\mathbf F \cdot (\mathbf r_u \times \mathbf r_v) dA$
$\iint_S \mathbf F \cdot d\mathbf S=\iint_D (-P\frac{\partial g}{\partial x}-Q\frac{\partial g}{\partial y}+R) dA$
6. Teorema de Stokes
El teorema de Stokes se puede considerar un equivalente del teorema de Green pero para una dimensión más alta al relacionar una integral de liena con una integral de superficie.
Sea $S$ una superficie orientada y suave a segmentos, acotada por una curva frontera $C$ suave a segmentos, cerrada y simple, con orientaciones positivas y $\mathbf F$ un campo vectorial con derivadas parciales continuas sobre la región que contiene a $S$ entonces:
$\int_C\mathbf F \cdot d\mathbf r=\iint_S \nabla \times \mathbf F \cdot d \mathbf S$
7. Teorema de la Divergencia
Similar al teorema de Stokes el teorema de la divergencia relaciona la integral de superficie con una integral tripe sobre un volumen. Observe que son variaciones de los diferentes resultados de las operacioens vectoriales de las integrales pero en dimensiones más altas.
$\iint_S\mathbf F \cdot d\mathbf S=\iiint_E \nabla \cdot F dV$